INTRODUCTION
The following lab demonstrates knowledge in basic LiDAR data structure and processing using ERDAS Imagine and ArcGIS. Specifically, it demonstrates the ability to process and retrieve digital surface models (DSMs) and digital terrain models (DTMs), and processing and creation of imagery from the point cloud. The scenario is to envision being a GIS manager working to check LiDAR point cloud data and verify classification in Eau Claire County, WI. After verifying and correcting point cloud data, a DSM, a DTM, and an intensity image was produced.
METHODOLOGY
Creating an LAS Dataset
Using ArcMap, a new LAS Dataset was made and all LAS files, showing points in tiles, were added. Calculating statistics for the dataset gave information to determine quality assurance and quality control of individual files and the overall dataset. Comparing the Min Z and Max Z with known elevation of the AOI gives this answer.
Next, to assign the correct coordinate system to the LAS dataset, the metadata from the original point cloud data obtained from
Eau Claire County, 2013 was analyzed and assigned accordingly to the XY and Z projected coordinate systems. The dataset was then added to ArcMap with a shapefile of Eau Claire County obtained from Price, 2016 to ensure spatial accuracy. A reclassification from 9 to 8 classes allowed for better representation of elevation.
The aspect, slope, and contour of the AOI can then be examined and be used to provide supporting data to improve classification within an Expert System classifier.
Visualization as Point Cloud
To further analyze any given feature of the AOI, a profile can be derived using the LAS Dataset Profile View tool. Instead of showing an aerial image of the first return echoes of LiDAR, this allows for a 3D profile image containing multiple return echoes to determine a feature's actual shape.
Generating DSMs and DTMs from Point Clouds
For better visualization of the AOI, a DSM and DTM each enhanced by hillshade was generated. To determine the spatial resolution for these derivative products, the average nominal pulse spacing (NPS) was obtained from the dataset properties. The dataset was then set to points coded by elevation and filtered by first returns.
Using the Arc Toolbox to generate a DSM, the LAS dataset was converted to a raster. Binning interpolation type with a maximum cell assignment and natural neighbor void fill method was used. The sampling type was set to approximately 2 meters. To enhance this DSM, a hillshade was applied, narrowing the grayscale of the imagery to just the shades of objects. This was done using the hillshade function in the 3D analyst tools.
To obtain a conversion from LAS dataset to a DTM, the dataset was left on points coded by elevation, but instead filtered by ground. The same conversion was performed with the same parameters except for a minimum cell assignment. A hillshade of the DTM was performed with the exact methodology of the DSM.
For the final derivative, a LiDAR intensity image was produced by setting the LAS dataset to points and a first return set on the filter. For the LAS dataset conversion to raster, the same parameters were used as the DTM except the value field switched to intensity and call assignment type to average. Autocorrections to brightness were made switching the image from ArcMap to ERDAS Imagine.
RESULTS
Creating an LAS Dataset
Figure 1 shows Eau Claire point cloud data according to aspect. The different shades delineate specific parts and features of the aerial photography.
 |
| Figure 1: Aspect view |
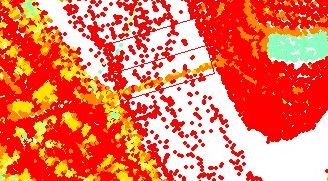
Figure 2 shows Eau claire point cloud data according to slope. Red indicates the most dramatic change in slope, while green is the neutral, flat slope area.
 |
| Figure 2: Slope view |
Figure 3 shows Eau Claire point cloud data according to contour. The deep red color is used to indicate the outlines of specific objects and changes in elevation.
 |
| Figure 3: Contour view |
Visualization as Point Cloud
Figure 4 shows an Eau Claire walking bridge as orange points in a linear fashion crossing the white Eau Claire River as detailed by LiDAR. This is a 2D view of first-return echoes captured by the LiDAR sensor.
 |
| Figure 4: 2D bridge view |
Using a profile view, the shape of the actual walking bridge is obtained by showing multiple return echoes captured by LiDAR, thus giving a better interpretation of the actual shape of a feature.
 |
| Figure 5: 3D bridge view |
Generating DSMs and DTMs from Point Clouds
The average NPS for Eau Claire was 1.55 meters which gave the 2m spatial resolution used for Figures 6-10. The digital surface model in Figure 6 is a raster showing elevation collected at the first return by LiDAR. This imagery can be used as supporting data for classification of forest and buildings and other structures above ground surface.
 |
| Figure 6: DSM of Eau Claire County |
The hillshade function as shown by Figure 7 narrows the gradient, providing the grayscale to only include shades of objects in Eau Claire.
 |
| Figure 7: Enhanced DSM using hillshade technique |
The DTM of Eau Claire shown in Figure 8 represents the bare-Earth terrain and excludes first return echoes for ground return echoes collected by LiDAR.
 |
| Figure 8: DTM of Eau Claire County |
Just as Figure 7 did for the DSM, the hillshade again narrows the gradient to show only shades of the elevation in the terrain, providing much more useful imagery for the DTM as shown by Figure 9.
 |
| Figure 9: Enhanced DTM using hillshade technique |
For Figure 10, a LiDAR intensity map was derived from original point cloud data and transferred from ArcMap to ERDAS to adjust brightness for better aerial interpretation.
 |
| Figure 10: LiDAR Intensity of Eau Claire County |
SOURCES
LiDAR point cloud and Tile Index drawn from
Eau Claire County, 2013.
Eau Claire County shapefile was from Price, M. H. (2012). Mastering ArcGIS. Dubuque, IA: McGraw-Hill.









No comments:
Post a Comment